數(shù)據(jù)中心自動駕駛網(wǎng)絡(luò)技術(shù)白皮書 關(guān)鍵網(wǎng)絡(luò)技術(shù)的研究與展望
隨著云計(jì)算、大數(shù)據(jù)和人工智能技術(shù)的飛速發(fā)展,數(shù)據(jù)中心作為數(shù)字經(jīng)濟(jì)的核心基礎(chǔ)設(shè)施,其規(guī)模與復(fù)雜性正以前所未有的速度增長。傳統(tǒng)依賴人工規(guī)劃、配置、運(yùn)維和優(yōu)化的網(wǎng)絡(luò)管理模式已難以應(yīng)對動態(tài)、大規(guī)模的業(yè)務(wù)需求,網(wǎng)絡(luò)運(yùn)維成本高昂且效率低下,故障響應(yīng)與恢復(fù)速度成為業(yè)務(wù)連續(xù)性的瓶頸。在此背景下,“自動駕駛網(wǎng)絡(luò)”理念應(yīng)運(yùn)而生,旨在通過引入高度自動化、智能化的技術(shù),實(shí)現(xiàn)數(shù)據(jù)中心的自我配置、自我修復(fù)、自我優(yōu)化和自我防護(hù),最終達(dá)到網(wǎng)絡(luò)運(yùn)維的“零接觸”與“零中斷”。本白皮書聚焦于實(shí)現(xiàn)數(shù)據(jù)中心自動駕駛網(wǎng)絡(luò)所涉及的關(guān)鍵網(wǎng)絡(luò)技術(shù)研究,旨在勾勒其技術(shù)框架、核心挑戰(zhàn)與發(fā)展路徑。
一、 自動駕駛網(wǎng)絡(luò)的核心內(nèi)涵與技術(shù)愿景
數(shù)據(jù)中心自動駕駛網(wǎng)絡(luò)并非追求完全無需人類干預(yù)的“無人駕駛”,而是借鑒自動駕駛汽車的分級理念,設(shè)定從輔助運(yùn)維(L1-L2)到高度自治(L3-L4),乃至完全自治(L5)的演進(jìn)目標(biāo)。其核心內(nèi)涵在于構(gòu)建一個集數(shù)據(jù)采集、智能分析、策略生成與自動化執(zhí)行為一體的閉環(huán)系統(tǒng)。技術(shù)愿景是實(shí)現(xiàn)網(wǎng)絡(luò)的“意圖驅(qū)動”:運(yùn)維人員或業(yè)務(wù)系統(tǒng)只需聲明業(yè)務(wù)意圖(如“為A應(yīng)用提供100Gbps帶寬且延遲低于1毫秒的連接”),網(wǎng)絡(luò)系統(tǒng)便能自動理解、分解意圖,并驅(qū)動底層物理與虛擬資源完成部署、保障與優(yōu)化,全過程無需人工介入具體配置命令。
二、 關(guān)鍵技術(shù)研究領(lǐng)域
實(shí)現(xiàn)上述愿景,需要多領(lǐng)域技術(shù)的深度融合與創(chuàng)新,主要包括:
1. 全域可觀測性技術(shù):
這是自動駕駛網(wǎng)絡(luò)的“感官系統(tǒng)”。需要研究大規(guī)模、實(shí)時、多維度的數(shù)據(jù)采集技術(shù),覆蓋網(wǎng)絡(luò)流量、設(shè)備狀態(tài)、應(yīng)用性能、安全事件等。重點(diǎn)包括:
- 帶內(nèi)遙測(In-band Network Telemetry, INT)等技術(shù),實(shí)現(xiàn)數(shù)據(jù)包級路徑的可視化與性能監(jiān)測。
- 高性能時序數(shù)據(jù)庫與流處理技術(shù),以應(yīng)對海量監(jiān)測數(shù)據(jù)的實(shí)時攝入與分析。
- 統(tǒng)一的數(shù)據(jù)模型與標(biāo)準(zhǔn)化接口(如OpenConfig),打破設(shè)備與系統(tǒng)間的數(shù)據(jù)孤島。
2. 網(wǎng)絡(luò)數(shù)字孿生技術(shù):
這是自動駕駛網(wǎng)絡(luò)的“試驗(yàn)場”與“預(yù)演沙盤”。通過構(gòu)建一個與物理網(wǎng)絡(luò)實(shí)時同步、高保真的虛擬鏡像,可以在不影響生產(chǎn)環(huán)境的前提下,進(jìn)行網(wǎng)絡(luò)變更模擬、故障推演、容量規(guī)劃與策略驗(yàn)證。研究重點(diǎn)在于模型構(gòu)建的準(zhǔn)確性、與物理世界的同步效率,以及仿真推演的智能算法。
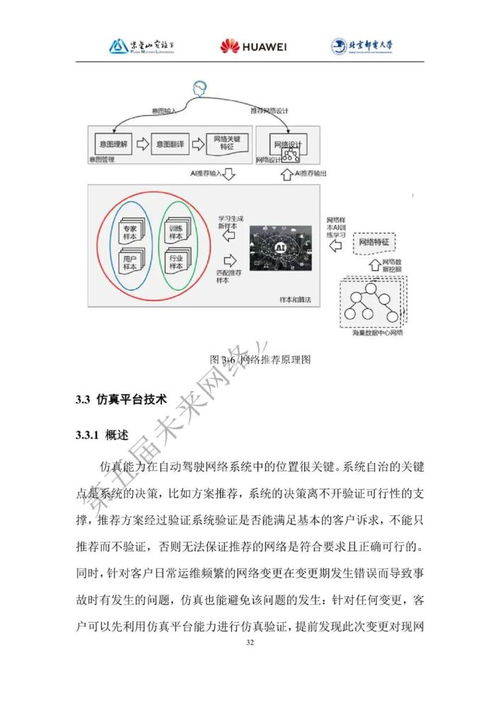
3. 人工智能與智能決策技術(shù):
這是自動駕駛網(wǎng)絡(luò)的“大腦”。研究如何將機(jī)器學(xué)習(xí)、深度學(xué)習(xí)、強(qiáng)化學(xué)習(xí)等AI算法應(yīng)用于網(wǎng)絡(luò)領(lǐng)域,核心場景包括:
- 智能故障定位與根因分析:從海量告警與指標(biāo)中快速定位問題本源。
- 流量預(yù)測與智能調(diào)度:預(yù)測業(yè)務(wù)流量變化,提前進(jìn)行路徑優(yōu)化與資源調(diào)整。
- 意圖網(wǎng)絡(luò)與策略自動化:將高層業(yè)務(wù)意圖自動翻譯、分解為可執(zhí)行的網(wǎng)絡(luò)策略。
- 安全威脅智能檢測與自動響應(yīng):識別異常流量與潛在攻擊,并啟動緩解措施。
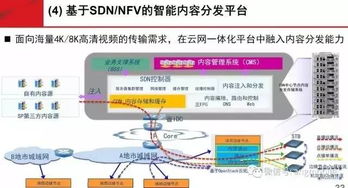
4. 云網(wǎng)一體化與可編程轉(zhuǎn)發(fā)技術(shù):
這是自動駕駛網(wǎng)絡(luò)的“執(zhí)行肢體”。研究重點(diǎn)包括:
- 軟件定義網(wǎng)絡(luò)(SDN)的深化應(yīng)用,實(shí)現(xiàn)控制面與轉(zhuǎn)發(fā)面的徹底分離與集中管控。
- 可編程芯片(如P4)與白盒交換機(jī),提供靈活、高效的轉(zhuǎn)發(fā)面,支持自定義數(shù)據(jù)包處理邏輯,快速響應(yīng)控制面下發(fā)的策略。
- 與云計(jì)算平臺(如Kubernetes)的深度集成,實(shí)現(xiàn)計(jì)算、存儲、網(wǎng)絡(luò)資源的統(tǒng)一編排與協(xié)同調(diào)度,支持微服務(wù)等現(xiàn)代應(yīng)用架構(gòu)的敏捷部署。
5. 閉環(huán)自動化與協(xié)同控制技術(shù):
這是將感知、決策、執(zhí)行串聯(lián)起來的“神經(jīng)網(wǎng)絡(luò)”。研究如何構(gòu)建穩(wěn)定、可靠、高效的自動化閉環(huán),確保策略執(zhí)行的可預(yù)期性與回滾能力。需解決多領(lǐng)域、多廠商設(shè)備間的協(xié)同控制問題,研究開放、標(biāo)準(zhǔn)的南向接口(如gNMI)與北向接口,以及跨域控制器間的協(xié)同機(jī)制。
三、 面臨的挑戰(zhàn)與未來展望
盡管前景廣闊,自動駕駛網(wǎng)絡(luò)的落地仍面臨諸多挑戰(zhàn):數(shù)據(jù)質(zhì)量與一致性保障、AI模型的可解釋性與可靠性、跨域多層網(wǎng)絡(luò)(Underlay與Overlay)的統(tǒng)一管控、現(xiàn)有存量網(wǎng)絡(luò)的平滑演進(jìn)、以及相關(guān)行業(yè)標(biāo)準(zhǔn)與人才體系的構(gòu)建等。
數(shù)據(jù)中心自動駕駛網(wǎng)絡(luò)技術(shù)的研究將沿著“單點(diǎn)智能->局部自治->全局協(xié)同”的路徑持續(xù)深化。其發(fā)展不僅將徹底革新數(shù)據(jù)中心的運(yùn)維模式,大幅提升資源利用率和業(yè)務(wù)敏捷性,更將為5G、邊緣計(jì)算、工業(yè)互聯(lián)網(wǎng)等新興場景提供至關(guān)重要的網(wǎng)絡(luò)基礎(chǔ)設(shè)施保障。產(chǎn)學(xué)研用各界的通力合作,持續(xù)推動技術(shù)創(chuàng)新與生態(tài)構(gòu)建,是加速這一未來網(wǎng)絡(luò)范式成熟與應(yīng)用的關(guān)鍵。
如若轉(zhuǎn)載,請注明出處:http://www.dksjx.cn/product/61.html
更新時間:2026-03-23 10:51:05